
Collet Hand®.
Collet Hand
Light-weight, compact, and high-precision hand with a built-in air cylinder that the know-how as a collet chuck manufacturer is integraded
Collet Hand Structure
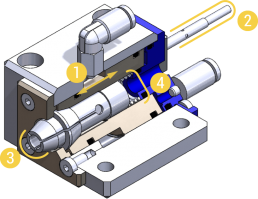
1. Built-in air cylinder mechanism
The gripping force can be controled by adjusting air pressure.
2. A sensor
A sensor that detects the sleeve position can be installed. *Square semsor model
3. Collet chuck
The collet chuck achieves a high gripping force with a repeatability of ±0.005 mm. Various workpieces can be handled by changing the collet chuck.
4. Coil spring
The clamping accuracy in the thrust direction increases by restricting the collet chuck movement.
U.S. Patent No. 11,440,204
Collet Hand Selection
You can select the collet hand best suited to your environment based on the workpiece gripping method/shape and style of mounting device.
Collet chucks are sold separately.

Standard Collet Hand
Repeatability <±0.005mm
This collet hand grips the outer diameter of a workpiece.
The hollow design allows it to handle long workpieces (except for the rotary version).
Used for grinding, gluing, welding, conveying, assembling, caulking, etc.

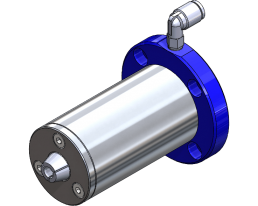
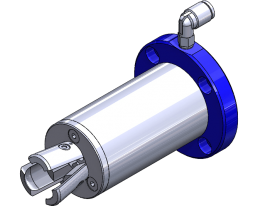
Round type
For custom machine
For gripping materials and securing tools during machining

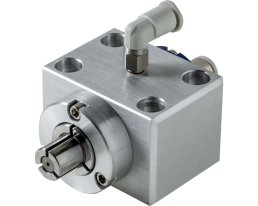
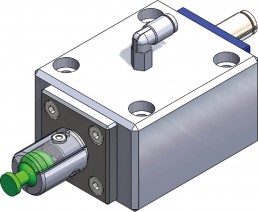
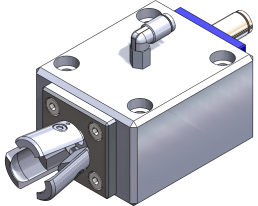
Square type
For orthogonal robot
For handling small or odd-shaped parts
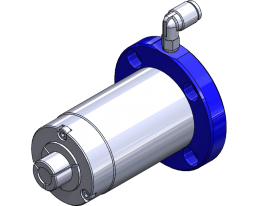
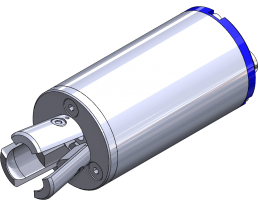
Robot type
For Cobot/Articulated robot
Easy installation on industrial robots.
For assembly and transfer operations.

Collet chuck is sold separately.
Inner-grip Collet Hand
Repeatability <±0.015mm
This collet hand grips the inside diameter of the workpiece.
Ideal for workpieces that cannot be gripped on the outside diameter.
Adjustable clamping force can be adjusted to accommodate thin pipe materials, etc.

Round type
For custom machine
For welding and adhering workpieces that cannot be gripped by the outer surface
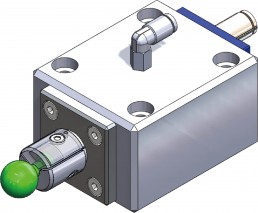
Square type
For orthogonal robot
For conveying and inspecting workpieces that cannot be grasped by the outer surface
Robot type
For Cobot/Articulated robot
Easy installation on industrial robots.
For assembly and transfer operations.

Collet chuck is sold separately.
Over-grip Collet Hand
For handling spherical workpieces and stepped workpieces
Collet chuck opening approximately 20 times larger
Accurate clamping of spherical or stepped workpieces
Claws can be made to match the shape of the workpiece
Claws can be easily replaced
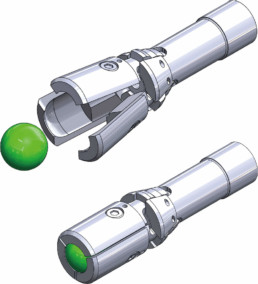
- Built-in air cylinder mechanism
- Wide-open
- Flexible structure
- Over-grip hand
Gripping a spherical workpiece
Gripping a stepped workpiece
Round type
For custom machine
For welding and adhering stepped and spherical workpieces
Square type
For orthogonal robot
For handling stepped and spherical workpieces
Robot type
For Cobot/Articulated robot
Easy installation on industrial robots.
For assembly and transfer operations.
Collet chuck is sold separately.