
夹头手®。
夹头手
融合了夹头厂家的技术诀窍的内置汽缸的轻量化、小型化、高精度夹头手
夹头手结构
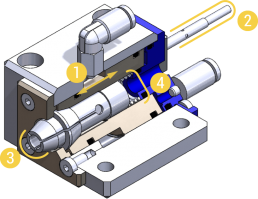
1.内置汽缸
由于内置汽缸,可以通过气压调节握持力。
2.夾持传感器
可以安装检测套筒位置的传感器。※方形传感器
3.夹头
搭载夹头实现了高握持力,重复精度为±0.005mm。通过更换夹头,可以应对各种工件。
4.螺旋弹簧
通过限制夹头的动作,提高了推力方向的夹持精度。
日本专利第7051152号处理装置
美国专利号:11,440,204
美国专利号:11,440,204

标准夹头手
重复精度<±0.005毫米
夹头手用于夹住工件的外径。
中空设计使手部可以处理长的工件(旋转型除外)。
用于研磨、胶合、焊接、输送、装配和填缝。

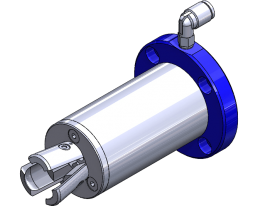
圆形
专用机(分体拧紧)用
用于在加工过程中夾持材料和固定刀具

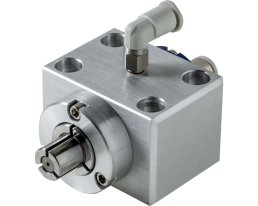
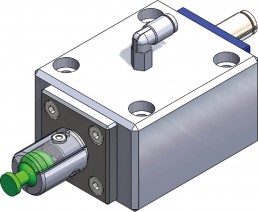
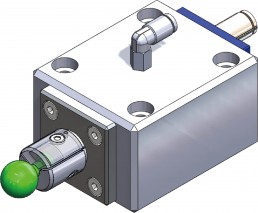
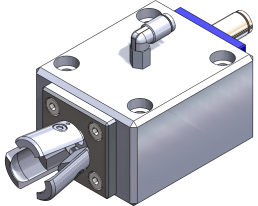
方形
用于直交机器人
用于夾持小型零件和异形零部件
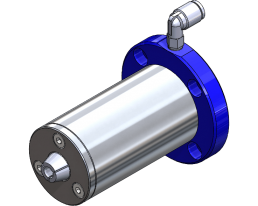
机器人型
用于协作/垂直多关节机器人
易于安装在工业机器人上。
用于装配和运输作业。

夹头卡盘单独出售。
内径夹持夹头手
重复精度<±0.015毫米
夹头手用于夹持工件的内径。
适用于不能夹住外径的工件。
夹持力可以调整,以适应薄管材料。

圆形
专用机(分体拧紧)用
适用于无法把持外径的 焊接・粘接加工等
方形
用于直交机器人
用无法把持外径工件的搬运・检查等
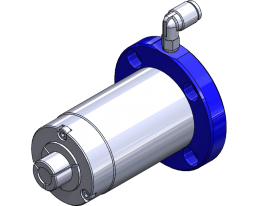
机器人型
用于协作/垂直多关节机器人
易于安装在工业机器人上。
用于装配和运输作业。

夹头卡盘单独出售。
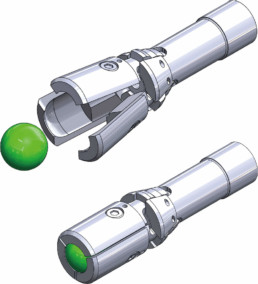
握式夹头手
用于处理球形工件和梯形工件
夹头卡盘开口增加约20倍
精确地夹持球形和阶梯形工件
爪子可以根据工件形状来制造
爪子可以很容易地更换。
- 内置汽缸
- 敞开
- 灵活运用的结构
- 跳跃夹头手
夾持球形
跳跃夾持
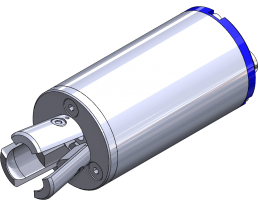
圆形
专用机(分体拧紧)用
用于阶梯状和球形工件的焊接・粘接
方形
用于直交机器人
用于夾持阶梯状和球形工件
机器人型
用于协作/垂直多关节机器人
易于安装在工业机器人上。
用于装配和运输作业。
夹头卡盘单独出售。