
Collet Hand®
コレットハンド
コレットチャックメーカーのノウハウを集約した、エアシリンダ内蔵の軽量・コンパクト・高精度ハンド
コレットハンドの構造
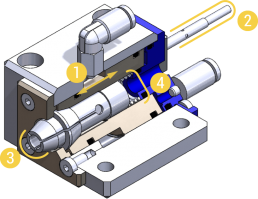
1. エアシリンダ内蔵
エアシリンダを内蔵しているため、エア圧により、把持力の調整が可能です。
2. 把持センサ
スリーブ位置を検知するセンサの搭載が可能です。※四角型センサ仕様
3. コレットチャック
コレットチャック搭載により、繰返し精度 ±0.005mmと、強い把持力を実現します。コレットチャック交換で、様々なワークに対応可能です。
4. コイルばね
コレットチャックの動きを制限することで、スラスト方向の把持精度を向上させます。
日本国特許第7051152号 ハンドリング装置
U.S. Patent No. 11,440,204
U.S. Patent No. 11,440,204
コレットハンドの選定
ワークの把持方法・形状、取付装置の様式からお客様の環境に最適なコレットハンドをお選びいただけます。
※ コレットチャックは別売りです

スタンダードコレットハンド
繰返し精度 <±0.005mm
ワークの外径を把持するコレットハンドです。
中空仕様を採用することで、長いワークにも対応することが出来ます(回転仕様を除く)。
研削加工、接着、溶接、搬送、組立、カシメ等に使用されています。

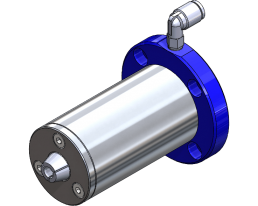
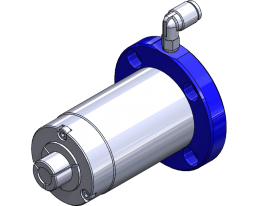
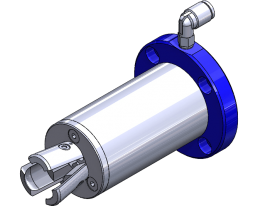
丸型
専用機(割締め)向け
機械加工時の材料把持や工具の固定に

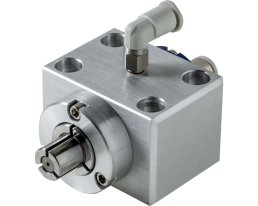
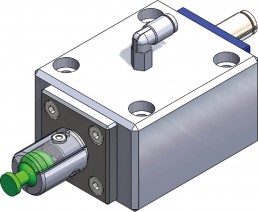
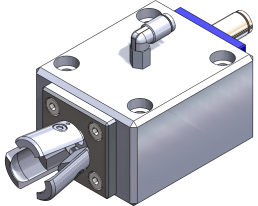
四角型
直交ロボット向け
小型部品や異形部品のハンドリングに
ロボット型
協働/垂直多関節ロボット向け
産業用ロボットに簡単取付。
組立・搬送作業に

※ コレットチャックは別売りです
インナーグリップ コレットハンド
繰返し精度 <±0.015mm
ワークの内径を把持するコレットハンドです。
外径を把持できないワークに最適です。
把持力調整により、薄いパイプ材等にも対応できます。

丸型
専用機(割締め)向け
外径を把持できないワークの溶接加工・接着等に
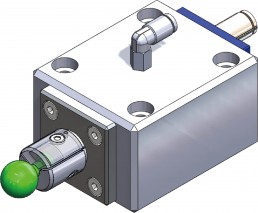
四角型
直交ロボット向け
外径を把持できないワークの搬送・検査等に
ロボット型
協働/垂直多関節ロボット向け
産業用ロボットに簡単取付。
組立・搬送作業に

※ コレットチャックは別売りです
オーバーグリップ コレットハンド
球形状ワークや段付きワークのハンドリングに
コレットチャック開き量を約20倍
球形状や段付きワークを正確に把持
ワーク形状に合わせたツメが製作可能
ツメは簡単に交換可能
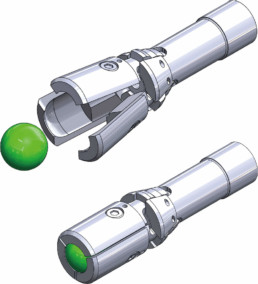
- エアシリンダ内蔵
- ワイドオープン
- フレキシブル構造
- 飛び越しハンド
球形状把持
飛び越し把持
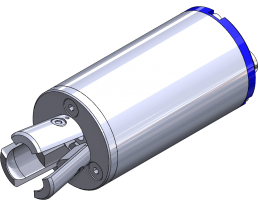
丸型
専用機(割締め)向け
段形状ワークや、球形状ワークの溶接加工・接着等に
四角型
直交ロボット向け
段形状ワークや、球形状ワークのハンドリングに
ロボット型
協働/垂直多関節ロボット向け
産業用ロボットに簡単取付。
組立・搬送作業に
※ コレットチャックは別売りです