技術紹介
高精度加工
難削材加工
微細穴加工
医療機器製造
製品情報
コレットチャック
コレットハンド
チャックユニット
スピンドル
微細穴加工機
イージーノットK.O.グリップ持針器
設備概要
会社情報
代表あいさつ
会社概要
トピックス
品質方針・体質改善活動
CSR
沿革
採用情報
採用情報
よくある質問
お問い合わせ
言語を選択
English
中文 (简体)
東京大学大学院精密工学研究室との協力事例
東京大学大学院精密工学研究室との協力事例
ホーム
産学官連携
東京大学大学院精密工学研究室との協力事例
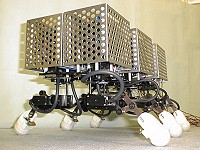
「自立分散型多足ロボット研究」の協力の事例
自律分散型多脚歩行ロボット